
Ongelmanratkaisussa konenäöllä (machine vision) on pitkät juuret ja monia sovelluksia. Teknologian voidaan katsoa olevan niin vanhaa, että se on matkan varrella yhdistetty tietokoneteknologiaan. Näin ajatellen yksinkertaista konenäköä on ollut olemassa jo ennen tietoteknologian yleistymistä. Murros konenäön tuotantokäytössä ja yleistymisessä on kuitenkin tapahtunut 1980-luvulla ja tuolloin digitaalisuudella on jo ollut merkittävä mahdollistava rooli konenäössä (Zuech 2019, 7).
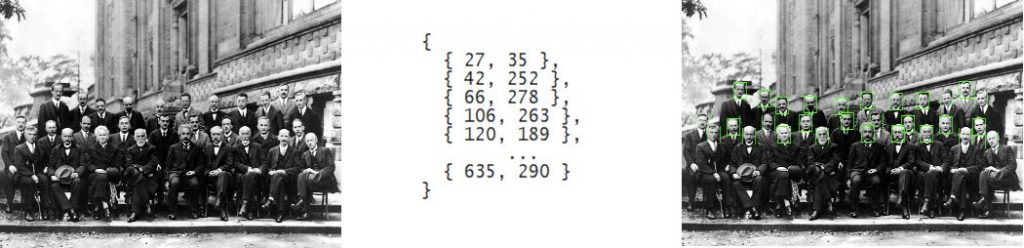
Konenäkö tuottaa kuvaan pohjautuvaa uutta tietoa, jonka se esittää typistetyssä muodossa. Konenäköjärjestelmä ei ainoastaan muunna olemassa olevaa kuvaa esimerkiksi korjaamalla väritasapainoa, kuten kuvankäsittelyjärjestelmät. Järjestelmän ei tarvitse tallentaa kuvaa myöhempää esittämistä varten, kun tieto on tuotettu. Yksinkertaisimmillaan konenäöllä tehdään kyllä/ei-tulkinta kuvan sisällöstä. Monimutkaisempi tulkinta on kuvan kategorisointi. Oikein ilmaisten kuvasta tehty johtopäätös on aina kokoelma lukuja.
Konenäköön liittyy lähes aina suhteellisuutta ja todennäköisyyttä, vaikka näitä yritetään minimoida. Yleensä ihminen määrittelee koneelle säännöt ja kynnysarvot joko ohjelmoimalla ne suoraan tai näyttämällä koneelle malleja. Säännöt voivat olla yksinkertaiseltakin kuulostavassa tehtävässä matemaattisesti hyvinkin monimutkaisia.
Konenäköä vai kuvankäsittelyä?
Sisällölliseltä merkitykseltään konenäköohjelman tuottamat luvut voivat olla esimerkiksi luokkia, todennäköisyyksiä, alueiden koordinaatteja tai frekvenssejä. Lukujen merkityksen ja esitystavan päättää tarpeiden perusteella järjestelmän ohjelmoija. Lukuarvoista koostuva johtopäätös on usein tarpeellista esittää ihmiselle kuvana tai animaationa. Ei ole aina helppoa erottaa, milloin kuvalle on tehty yksinkertainen muunnos kuvankäsittelyllä ja milloin monimutkainen järjestelmä esittää luvuista koostuvan johtopäätöksen alkuperäisen kuvan avulla.
Kahdenlaista konenäköä
Konenäköä on kirjallisuudessa kahta lajia. Kirjallisuutta löytyy sekä tietokonenäöstä (computer vision) että konenäöstä (machine vision). Tietokonenäkö keskittyi perinteisesti teoreettisempaan ohjelmointimenetelmien tutkimiseen. Konenäön tavoitteena oli rakennella käytännön laitteita tehtaiden tuotantolinjoille käyttämällä kameroita, tietokoneita ja tietokonenäön tutkimustuloksia. Nykyisin molemmilla termeillä tarkoitetaan usein sekä tietokonenäön että konenäön koko laajaa kenttää (Davies, 2012, 13).
Uusi julkisuuskuva
Pitkästä historiastaan huolimatta konenäkö esitetään viimeaikaisissa uutisissa uutukaisena tekoälyteknologiana, jolla autot näkevät esteitä ja röntgenlaitteet syöpäkasvaimia. Tiedonkeruuseen tietokonenäössä (computer vision) sisältyy usein tekoälytutkimuksen tulosten hyödyntämistä. Tietokonenäkö luetaan usein tekoälytutkimuksen osaksi, vaikka se yhdistelee toimintatapoja muualtakin tietojenkäsittelytieteestä ja eri insinööritieteistä. Arjessa konenäkö voi kuitenkin jo olla piilossa esimerkiksi pullonpalautuskoneen syövereissä.
Uusimman teknologian avulla konenäkö yrittää yhä jalostaa kuvatietoa asteittain käsitteellisemmäksi tiedoksi. Juuri tämä on alusta asti ollut konenäkötutkimuksen kohteena.
Kirjoittaja
Jan-Erik Sandelin on LAB-ammattikorkeakoulun liiketoimintayksikön lehtori, joka työskentelee opetustyön ohella Konenäön sovellukset sote- ja hyvinvointialalla -hankkeen teknisenä asiantuntijana.
LAB-ammattikorkeakoulun Konenäön sovellukset sote- ja hyvinvointialalla -hanke jalkauttaa konenäköteknologian ratkaisuja sosiaali- ja terveysalan yrityksiin. Hankkeen tavoitteena on tehdä konenäköön liittyvää teknologiaa tutuksi sote-ja hyvinvointialoilla, jolloin asiakaslähtöinen, tarpeisiin kohdistuva kehittäminen on mahdollista.
Lähteet
Zuech, N. 2019. Understanding and Applying Machine Vision, Revised and Expanded, 2nd Edition. CRC Press/Taylor & Francis, Boca Raton, USA.
Viola, P., Jones M. 2001. Rapid object detection using a boosted cascade of simple features. Julkaisussa: Proceedings of the 2001 IEEE Computer Society Conference on Computer Vision and Pattern Recognition. CVPR 2001, Kauai, USA.
Davies, E. R. 2012. Computer and Machine Vision, 4th Edition, Theory, Algorithms, Practicalities. Academic Press/Elsevier, Waltham, USA.
Liukkonen, J. 2015. Master’s thesis: Machine vision system for a reverse vending machine. (Viitattu: 31.3.2020). Saatavissa: https://aaltodoc.aalto.fi/handle/123456789/19067
Roberts, L. 1963. Thesis (Ph. D.): Machine perception of three-dimensional solids. (Viitattu: 31.3.2020). Saatavissa: http://hdl.handle.net/1721.1/11589




{kind=link}
{kind=link}
{kind=link}
{kind=link}