Virtuaalitodellisuusteknologioiden (virtual reality, VR) kehitys on mahdollistanut uuden tavan harjoitella turvallisessa ympäristössä, sijainnista riippumatta. Osana Etelä-Karjalan ja Kymenlaakson pelastuslaitosten Cross-Border Safety -hanketta, LAB-ammattikorkeakoulu toteutti heille räätälöidyn VR-harjoitteluympäristön (LAB 2022).
PaleBluen (2020) julkaisemassa artikkelissa kirjoitetaan VR-simulaatioiden vähentävän koulutuskustannuksia. Säästöjä muodostuu koulutukseen käytettävän ajan tarpeesta, koska oppiminen on nopeampaa. Samalla harjoittelu käytännössä poissulkee mahdollisuudet onnettomuuksille, joiden riski on aina olemassa perinteisissä harjoituksissa. (PaleBlue 2020.)
Tilakone ohjaa pelin hahmoja
Millingtonin (2019) mukaan tilakone on yleinen tekoälytekniikka, jonka avulla pelin hahmoja voidaan ohjata. Pelin hahmo voi olla yhdessä tilassa kerrallaan. Tila määrittelee hahmon käyttäytymisen ja tarkkailee ehtoja, jotka laukaisevat siirtymän seuraavaan tilaan. Seuraavassa kuvassa (kuva 1) esitetään yksinkertainen tilakone, jossa vartija aloittaa vartiointitilasta ja reagoi nähdessään vihollisen. (Millington 2019, 314–315.)
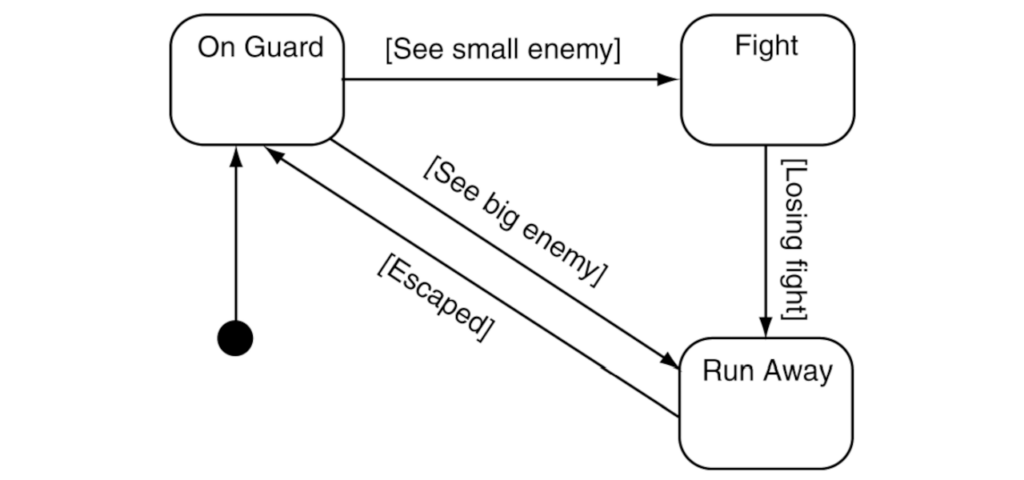
Vihollisen koon perusteella vartija joko taistelee tai juoksee karkuun. Jos vartija taistelee ja on häviämässä, hän yrittää karata taistelusta. Onnistuneen karkaamisen jälkeen, hän jatkaa vartioimista, kunnes näkee seuraavan vihollisen. (Millington 2019, 315.)
Tilakone VR-HYPO -simulaatiossa
VR-harjoitteluympäristö pelastustoimen operatiiviseen johtamiseen (VR-HYPO) -simulaation avulla yksiköiden johtajat voivat harjoitella pelastustilanteita ilman miehistöä. Tekoälyn toteutus VR-harjoitteluympäristöön -opinnäytetyössä simulaatiota varten toteutettiin yhteensä yhdeksän tilakonetta, joiden avulla simulaation pelihahmoja ohjataan. Pelaajat voivat antaa omalle yksikölleen käskyjä, jotka pelihahmoista koostuva miehistö toteuttaa tilakoneiden määrittelemällä tavalla. Käsky voi olla esimerkiksi pintapelastustehtävä, jolloin ensimmäinen miehistön jäsen lähtee pelastettavien luo uimalla, ja toinen pelastaja ottaa lautan käyttöön kuljettajan kanssa. Kuvassa 2 pelastajat ovat saavuttaneet pelastettavat ja valmistautuvat viemään heidät rantaan. (Ölander 2022.)

Tähän tilanteeseen pääsemiseksi on tarvittu viittä itsenäistä tilakonetta, joista kolme ohjaa pelastajia, neljäs lauttaa ja viides autoa. Kaikki aktivoivat ensimmäisen siirtymän pelaajan antaman käskyn saadessaan, mutta seuraavat eri tiloja ja siirtymiä päästäkseen kuvan osoittamaan vaiheeseen. (Ölander 2022.)
Realistisen ympäristön lisäksi VR-harjoittelusimulaatio tarvitsee todenmukaisia pelihahmoja. Pelihahmojen käyttäytymistä ohjaava tekoäly on olennainen osa simulaatiota, koska ilman sitä simulaatio vaatisi pelaajan jokaiselle hahmolle mukaan lukien pelastettavat ja ajoneuvot. Tekoälyn toteutus tilakonemallin avulla on yksinkertainen tapa VR-HYPOn kaltaisiin simulaatioihin, joissa pelihahmojen on toteutettava annetut käskyt, ja heidän toimintamallinsa tunnetaan. Samalla simulaatio toimii pohjana uusien simulaatioiden kehittämiseen.
Kirjoittajat
Matti Welin toimii yliopettajana LAB-ammattikorkeakoulussa Tieto- ja viestintätekniikan koulutusvastuussa. Hän toimi asiantuntijana Cross-Border Safety -hankkeessa.
Raoul Ölander on valmistumassa oleva Tieto- ja viestintätekniikan opiskelija. Hän on ollut mukana LAB-ammattikorkeakoulun hallinnoimassa Cross-Border Safety -hankkeessa, jossa hänen vastuullaan oli VR-HYPO -harjoitteluympäristön pelihahmojen tekoälyn toteutus.
Lähteet
LAB 2022. Cross-border safety, accident prevention and management. Projekti. Viitattu 16.12.2022. Saatavissa https://lab.fi/fi/projekti/cb-safe
Millington, I. 2019. AI for Games. 3. painos. Boca Raton: CRC Press.
PaleBlue. 2020. Collaboration Training in Virtual Reality. PaleBlue Newsroom. Viitattu 23.11.2022. Saatavissa https://pale.blue/2020/09/29/collaboration-training-in-virtual-reality/
Ölander, R. 2022. Tekoälyn toteutus VR-harjoitteluympäristöön. AMK-opinnäytetyö. LAB-ammattikorkeakoulu, tekniikan ala. Lahti. Viitattu 13.12.2022. Saatavissa https://urn.fi/URN:NBN:fi:amk-2022113025142




{kind=link}
{kind=link}
{kind=link}
{kind=link}